
In group theory, a branch of mathematics, given a group G under a binary operation ∗, a subset H of G is called a subgroup of G if H also forms a group under the operation ∗. More precisely, H is a subgroup of G if the restriction of ∗ to H × H is a group operation on H. This is usually denoted H ≤ G, read as "H is a subgroup of G".
The trivial subgroup of any group is the subgroup {e} consisting of just the identity element.
A proper subgroup of a group G is a subgroup H which is a proper subset of G (that is, H ≠ G). This is usually represented notationally by H < G, read as "H is a proper subgroup of G". Some authors also exclude the trivial group from being proper (that is, H ≠ {e}).[1][2]
If H is a subgroup of G, then G is sometimes called an overgroup of H.
The same definitions apply more generally when G is an arbitrary semigroup, but this article will only deal with subgroups of groups. The group G is sometimes denoted by the ordered pair (G, ∗), usually to emphasize the operation ∗ when G carries multiple algebraic or other structures.
Basic properties of subgroups
A subset H of the group G is a subgroup of G if and only if it is nonempty and closed under products and inverses. (The closure conditions mean the following: whenever a and b are in H, then ab and a−1 are also in H. These two conditions can be combined into one equivalent condition: whenever a and b are in H, then ab−1 is also in H.) In the case that H is finite, then H is a subgroup if and only if H is closed under products. (In this case, every element a of H generates a finite cyclic subgroup of H, and the inverse of a is then a−1 = an−1, where n is the order of a.)
The above condition can be stated in terms of a homomorphism; that is, H is a subgroup of a group G if and only if H is a subset of G and there is an inclusion homomorphism (that is, i(a) = a for every a) from H to G.
The identity of a subgroup is the identity of the group: if G is a group with identity eG, and H is a subgroup of G with identity eH, then eH = eG.
The inverse of an element in a subgroup is the inverse of the element in the group: if H is a subgroup of a group G, and a and b are elements of H such that ab = ba = eH, then ab = ba = eG.
The intersection of subgroups A and B is again a subgroup.[3] The union of subgroups A and B is a subgroup if and only if either A or B contains the other, since for example 2 and 3 are in the union of 2Z and 3Z but their sum 5 is not. Another example is the union of the x-axis and the y-axis in the plane (with the addition operation); each of these objects is a subgroup but their union is not. This also serves as an example of two subgroups, whose intersection is precisely the identity.
If S is a subset of G, then there exists a minimum subgroup containing S, which can be found by taking the intersection of all of subgroups containing S; it is denoted by ⟨S⟩ and is said to be the subgroup generated by S. An element of G is in ⟨S⟩ if and only if it is a finite product of elements of S and their inverses.
Every element a of a group G generates the cyclic subgroup ⟨a⟩. If ⟨a⟩ is isomorphic to Z/nZ for some positive integer n, then n is the smallest positive integer for which an = e, and n is called the order of a. If ⟨a⟩ is isomorphic to Z, then a is said to have infinite order.
The subgroups of any given group form a complete lattice under inclusion, called the lattice of subgroups. (While the infimum here is the usual set-theoretic intersection, the supremum of a set of subgroups is the subgroup generated by the set-theoretic union of the subgroups, not the set-theoretic union itself.) If e is the identity of G, then the trivial group {e} is the minimum subgroup of G, while the maximum subgroup is the group G itself.
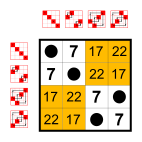
G is the group \( \mathbb {Z} /8\mathbb {Z} \) , the integers mod 8 under addition. The subgroup H contains only 0 and 4, and is isomorphic to \( \mathbb {Z} /2\mathbb {Z} \) . There are four left cosets of H: H itself, 1+H, 2+H, and 3+H (written using additive notation since this is an additive group). Together they partition the entire group G into equal-size, non-overlapping sets. The index [G : H] is 4.
Cosets and Lagrange's theorem
Main articles: Coset and Lagrange's theorem (group theory)
Given a subgroup H and some a in G, we define the left coset aH = {ah : h in H}. Because a is invertible, the map φ : H → aH given by φ(h) = ah is a bijection. Furthermore, every element of G is contained in precisely one left coset of H; the left cosets are the equivalence classes corresponding to the equivalence relation a1 ~ a2 if and only if a1−1a2 is in H. The number of left cosets of H is called the index of H in G and is denoted by [G : H].
Lagrange's theorem states that for a finite group G and a subgroup H,
\( [G:H]={|G| \over |H|} \)
where |G| and |H| denote the orders of G and H, respectively. In particular, the order of every subgroup of G (and the order of every element of G) must be a divisor of |G|.[4][5]
Right cosets are defined analogously: Ha = {ha : h in H}. They are also the equivalence classes for a suitable equivalence relation and their number is equal to [G : H].
If aH = Ha for every a in G, then H is said to be a normal subgroup. Every subgroup of index 2 is normal: the left cosets, and also the right cosets, are simply the subgroup and its complement. More generally, if p is the lowest prime dividing the order of a finite group G, then any subgroup of index p (if such exists) is normal.
Example: Subgroups of Z8
Let G be the cyclic group Z8 whose elements are
\( G=\left\{0,2,4,6,1,3,5,7\right\} \)
and whose group operation is addition modulo eight. Its Cayley table is
+ 0 2 4 6 1 3 5 7
0 0 2 4 6 1 3 5 7
2 2 4 6 0 3 5 7 1
4 4 6 0 2 5 7 1 3
6 6 0 2 4 7 1 3 5
1 1 3 5 7 2 4 6 0
3 3 5 7 1 4 6 0 2
5 5 7 1 3 6 0 2 4
7 7 1 3 5 0 2 4 6
This group has two nontrivial subgroups: J={0,4} and H={0,2,4,6}, where J is also a subgroup of H. The Cayley table for H is the top-left quadrant of the Cayley table for G. The group G is cyclic, and so are its subgroups. In general, subgroups of cyclic groups are also cyclic.
Example: Subgroups of S4 (the symmetric group on 4 elements)
Every group has as many small subgroups as neutral elements on the main diagonal:
The trivial group and two-element groups Z2. These small subgroups are not counted in the following list.

The symmetric group S4 showing all permutations of 4 elements
All 30 subgroups
Simplified
Hasse diagrams of the lattice of subgroups of S4
12 elements

The alternating group A4 showing only the even permutations
Subgroups:
Subgroups:





8 elements




6 elements
Symmetric group S3
Subgroup:Cyclic group 3; Cayley table; subgroup of S4 (elements 0,3,4).svg
Symmetric group S3
Subgroup:Cyclic group 3; Cayley table; subgroup of S4 (elements 0,11,19).svg
Symmetric group S3
Subgroup:Cyclic group 3; Cayley table; subgroup of S4 (elements 0,15,20).svg
Symmetric group S3
Subgroup:Cyclic group 3; Cayley table; subgroup of S4 (elements 0,8,12).svg
4 elements
Klein four-group
Klein four-group
Klein four-group
Klein four-group






3 elements
.svg)
.svg)
.svg)
.svg)
Other examples
The even integers are a subgroup of the additive group of integers: when you add two even numbers, you get an even number.
An ideal in a ring R is a subgroup of the additive group of R.
A linear subspace of a vector space is a subgroup of the additive group of vectors.
Let A A be an abelian group; the elements of A that have finite period form a subgroup of A called the torsion subgroup of } A.
See also
Cartan subgroup
Fitting subgroup
Stable subgroup
Fixed-point subgroup
Subgroup test
Notes
Hungerford (1974), p. 32
Artin (2011), p. 43
Jacobson (2009), p. 41
See a didactic proof in this video.
S., Dummit, David (2004). Abstract algebra. Foote, Richard M., 1950- (3. ed.). Hoboken, NJ: Wiley. p. 90. ISBN 9780471452348. OCLC 248917264.
References
Jacobson, Nathan (2009), Basic algebra, 1 (2nd ed.), Dover, ISBN 978-0-486-47189-1.
Hungerford, Thomas (1974), Algebra (1st ed.), Springer-Verlag, ISBN 9780387905181.
Artin, Michael (2011), Algebra (2nd ed.), Prentice Hall, ISBN 9780132413770.
S., Dummit, David (2004). Abstract algebra. Foote, Richard M., 1950- (3. ed.). Hoboken, NJ: Wiley. ISBN 9780471452348. OCLC 248917264.
Undergraduate Texts in Mathematics
Graduate Studies in Mathematics
Hellenica World - Scientific Library
Retrieved from "http://en.wikipedia.org/"
All text is available under the terms of the GNU Free Documentation License
